
- sam. 25 septembre 2021
- Cours
- #python jupyter notebook
Modélisation cinématique pour le contrôle d’un robot à roues holonomes
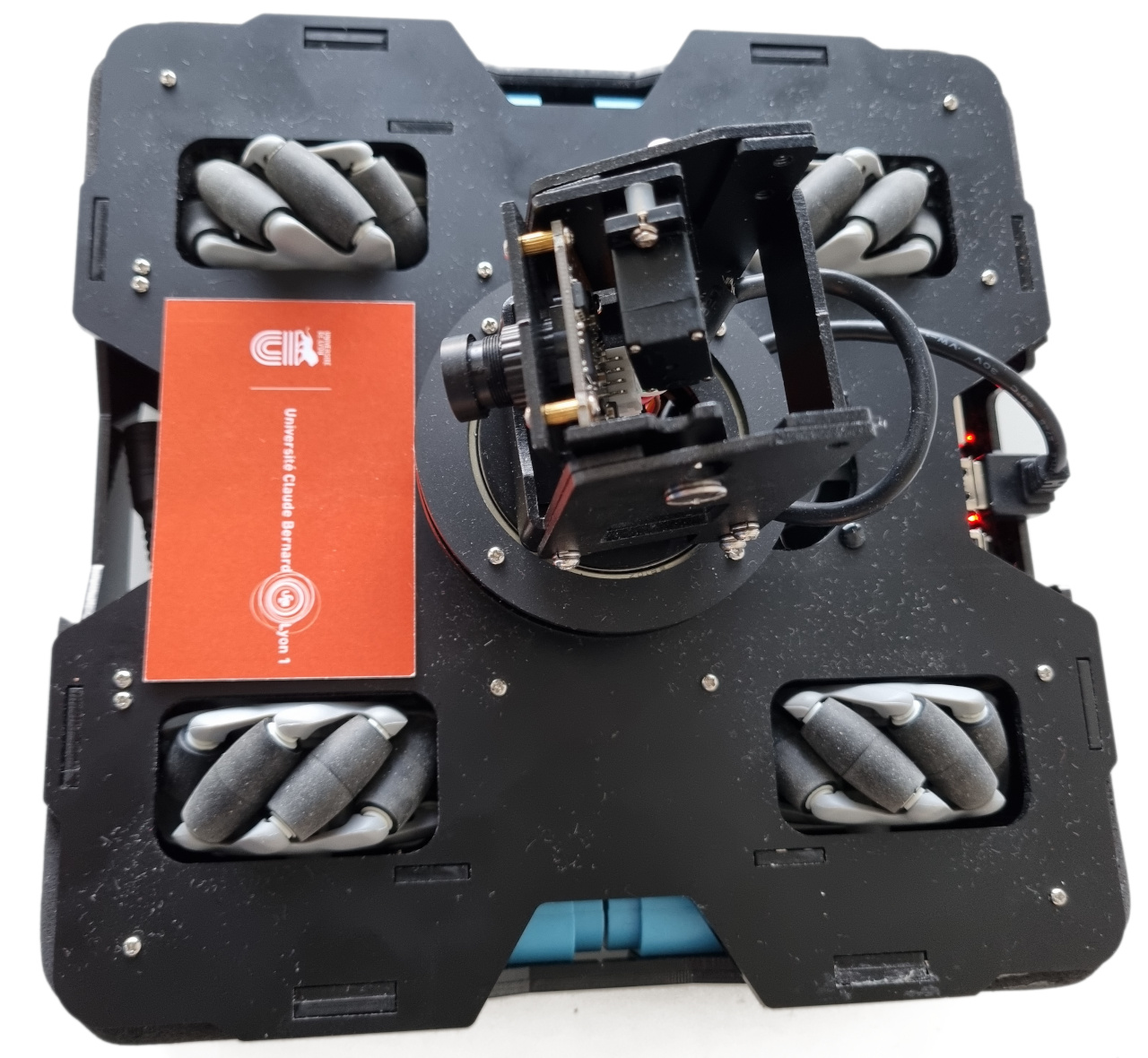
Ce notebook présente l’utilisation d’un modèle cinématique pour controller un robot à roues holonomes. Le robot utilisé “Raspblock” est proposé en kit sur le site Kubii et en ajoutant une carte Rasberry Pi 4, on obtiens un robot contrôlable en WIFI et programmable en Python. Ce robot éducatif basé sur Raspberry Pi 4B, utilise des roues Mecanum et des moteurs TT avec encodeur pour obtenir un mouvement omnidirectionnel à 360°. Il est de plus équipé d’une caméra caméra USB HQ mobille sur tourelle. Il embarque une carte d’extension avec des gyroscopes, des servos-moteurs, un haut-parleur et une interface moteur. Il embarque aussi un serveur Jupyter lab permettant sa programmation en python à distance en utilisant le WIFI.
-
Lien vers le notebook du modèle cinématique d’un robot à roues holonomes
-
Lien vers le notebook sur le contrôle d’un robot à roues holonomes
-
Video de démonstration du contrôle du robot pour un mouvement circulaire en translation